


virtual interactive whiteboard

A big advantage of the HOLOS sphere approach is that the pen tip can be detected
in mid air in 3D anywhere in the field of view of the camera and that also the 3D
orientation of the pen is detected. This means the pen can essentially be used like
an advanced 3D games controller allowing pointing, gesture recognition and even “drawing”
in 3D space. Note that the coordinate values are detected as absolutes in a fixed
reference frame, unlike the relative values given by accelerometer/gravitometers
in other hand held devices. This means a much higher precision for absolute position
and orientation detection can be achieved.
The maximal detection distance from the camera depends both on the Angle of View
(AOV) of the camera and the resolution of the camera chip, see some typical examples
in Table 2. For a normal lens the active detection volume has the shape of a tipped-over
pyramid or “Frustum”, with the pyramid's tip located at the camera’s lens as for
example in this setup.
|
Camera chip
resolution
|
Horizontal
Angle of View
|
Maximal detection distance
From camera
|
Detection frustum width and height at maximal distance
|
|
VGA, 640 x 480
|
62°
|
1.65 m
|
2 m x 1.5 m
|
|
VGA, 640 x 480
|
46°
|
2.3 m
|
2 m x 1.5 m
|
|
VGA, 640 x 480
|
28°
|
4 m
|
2 m x 1.5 m
|
|
HD720, 1280 x 720
|
28°
|
8 m
|
4 m x 2.2 m
|
|
HD1080, 1920 x 1080
|
28°
|
12 m
|
6 m x 3.3 m
|
For ultra wide angle fish-eye lenses the active volume becomes hemispherical with
the camera at the centre and the limit distance being the radius of the hemisphere.
For example in our current fish-eye lens setup where we use a 3MP camera and an approximately
180 degree Angle of View, the limit radius is about 2 meters in each direction. Note
that these limits only apply for full position and orientation detection and in the
case where 3D position alone is sufficient, like for example when the user is a person
in the audience (pen held like a games controller), the detection reaches twice as
far again.
Figure 6 shows the detection noise on the orientation angle of the pen in 3D in mid
air, which ranges from less than 0.07° to 0.33° at 100% of the maximal detection
distance from the camera.
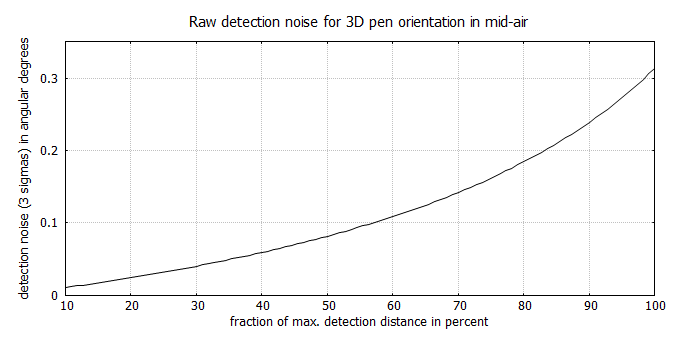
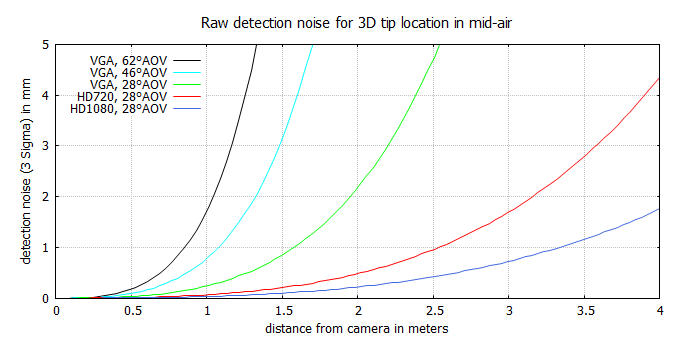
Figure 7 shows the 3 sigma detection noise for the 3D pen tip detection in mid-air.
Note that this is the raw detection noise without temporal averaging or smoothing.
The accuracy here is not as high as the sub millimeter accuracy achieved in the 2d
surface detection case (see Table 1), but still remarkable, for example less than
2 millimeters for up to 2 meters distance at VGA and 3 meters distance at 720HD resolution.
In live demo situations users have found our pen to give a much higher feeling of
precision for 3D control than typical computer 3D games controllers currently on
the market - so accurate in fact that we had first times users draw bicycles in mid-air
at demos/presentations. Note also that we are currently developing a stereo camera
version of the system where 3D detection accuracy is improved by a factor 10 to
possibly 100.
for a full distance, log scale version of this graph click here
here